
Different Types of Motors Used In Robotics
Robots with electric drives typically have superior precision and repeatability. As a result, electric robots are more compact, have less floor space and are more frequently used for precision tasks like assembly. An electric current generates electricity in this system. It operates quietly and requires little maintenance.
Electric motors are devices that use electricity to move objects mechanically. It can be divided into two types: DC (Direct Current) and AC (Alternating Current). There are various varieties within these categories, and each one has specific skills that make them ideal for use. DC motors are commonly used in robotic applications instead of AC motors because AC motors require alternating current to operate and controlling AC motors is much more challenging. The use of AC motors is limited to situations where there is a need for high initial torque. The following factors must be taken into consideration when choosing a motor, torque, voltage, speed, accuracy, power factor, and motor size.
The industry offers a wide variety of motor types. Certain motor types are frequently employed in robotic applications.
In this article, we take a look at the six main types of motors used in robotics
- AC motor
- Brushed DC motor
- Brushless DC motor
- Geared DC motor
- Servo motor
- Stepper motor
1. AC Motor
Robots rarely use alternating current (AC) motors since most of them are powered by direct current (DC) from batteries. Additionally, as DC is the preferred power source for electronic components, it is more practical to use it for actuators as well. In industrial settings where extremely high torque is required or if the motors are linked to the mains or a wall outlet, AC motors are typically employed.

2. Brushed DC Motor
Even though a brushless motor may run straight off a DC rail, there are benefits to utilizing a “real” driver component to supply both the necessary driving current and the many protection functions that are needed by all motor subsystems.
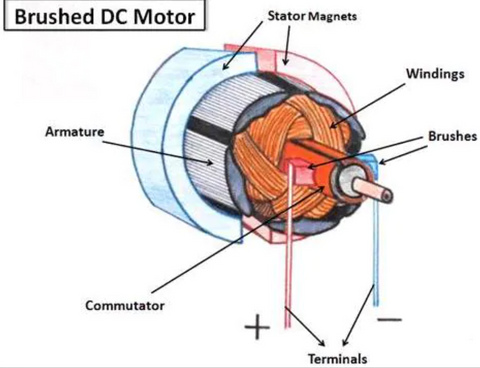
Experts like Charles Steinmetz spent a great deal of time on DC motor theory and practice because of the significant contribution medium and large BDC motors made to industrial and technical advancements in the 20th century. The performance parameters (speed, torque, control, and efficiency), design, fabrication, and practical issues were all covered in detail, as were the electromotive force, magnetic field, and circuit equations. For many years, all engineering programmers required courses in DC motor theory and application. These courses included extensive, practical lab sessions using both small and big DC motors. The advantages of this motor are a simple control application as compared to a brushless dc because power developed by a brushless looks like an AC motor.
3. Brushless DC Motor
Typical BLDC motors require complex electronic control circuitry as well as a method for monitoring the rotor position continually. A Hall Effect sensor or monitoring variations in the Back EMF at each armature coil as the motor rotates can both be used to identify the position of the rotor. While the applied voltage determines the speed of brushed DC motors, the PWM duty cycle determines the speed of BLDC motors; an increase in the duty cycle has the same impact as an increase in voltage. So, this motor is used only where there is the highest efficiency, smooth operation and low nose may it is by mechanical or electrical.

4. Geared DC Motor
One of the most common components in robotics is the geared DC motor. Therefore, having a high-quality DC Motor is essential. The torque and speed changeable of the DC gear motor, in addition to the use of batteries to aid movement, are what makes it so well suited for robotic applications. A DC motor’s ability to deliver a variety of variable speeds—an enormous range below or above the stated speed—is its perfect attribute. A DC motor can be speed-controlled because the supply voltage and motor speed are inversely related. You can alter the speed by altering the supply voltage. Additionally, the relationship between the motor’s speed and magnetic flux is inverse because of the issue with field winding. The speed of the motor can be altered by adjusting the armature voltage and impedance.

5. Servo Motor
The stator and rotor windings of the servo motor are wound on the stationary portion of the motor and the rotating portion of the motor, respectively. This motor uses less electricity, is very efficient, and requires little maintenance. The servo motor is fed by the driver amplifier, which receives velocity commands from the controller. Information on the position and speed of the servo motor is provided by some type of feedback device, such as a resolver or encoder. The resolver or encoder may be built within the motor or may be placed elsewhere. A servo motor can run with a particular motion profile that is programmed into the controller due to the closed-loop system.

6. Stepper Motor
The rotation is divided into several steps by a stepper motor. A stepper motor rotates by a predetermined number of angular steps, like how a servo motor rotates by a present angle. The motor’s rotation is divided up into tiny angular increments, and it can run with or without feedback. It can stop exactly at a command point without the use of brakes or clutch assemblies since it is driven by pulsed command signals. A permanent-magnet stepper motor often holds its last position when the power is turned off.

Read more: Different Types of Motors Used In Robotics


