
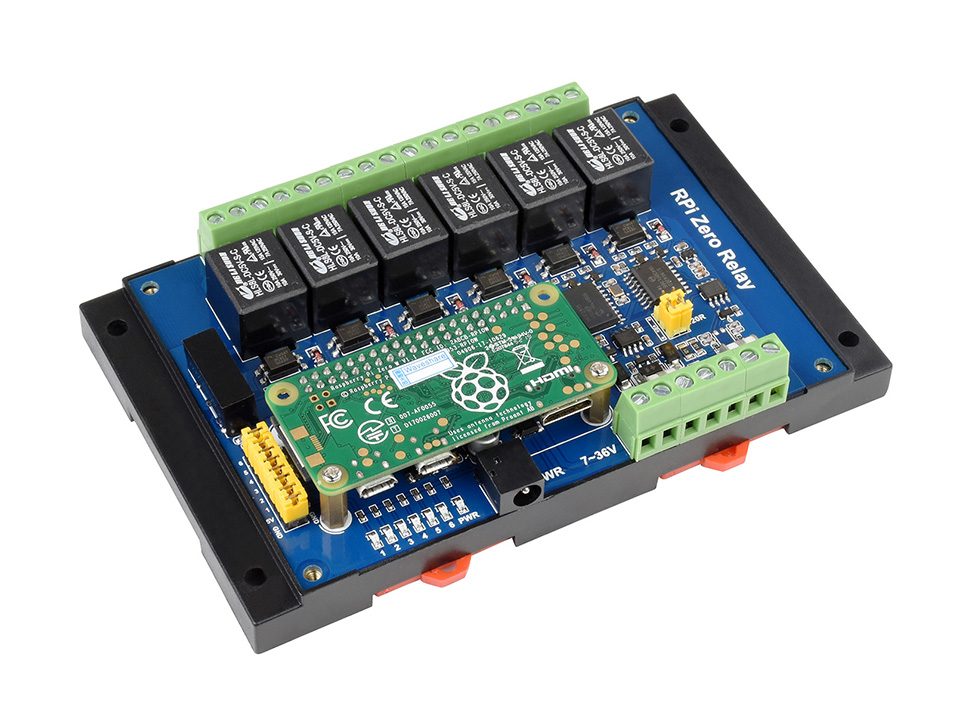
Industrial 6-ch Relay Module for Raspberry Pi Zero
Industrial 6-ch Relay Module for Raspberry Pi Zero, RS485/CAN, Isolated Protections, Tailored For Raspberry Pi Zero Series also Suitable For Raspberry Pi Zero With Pre-Soldered Pin header.
Features:
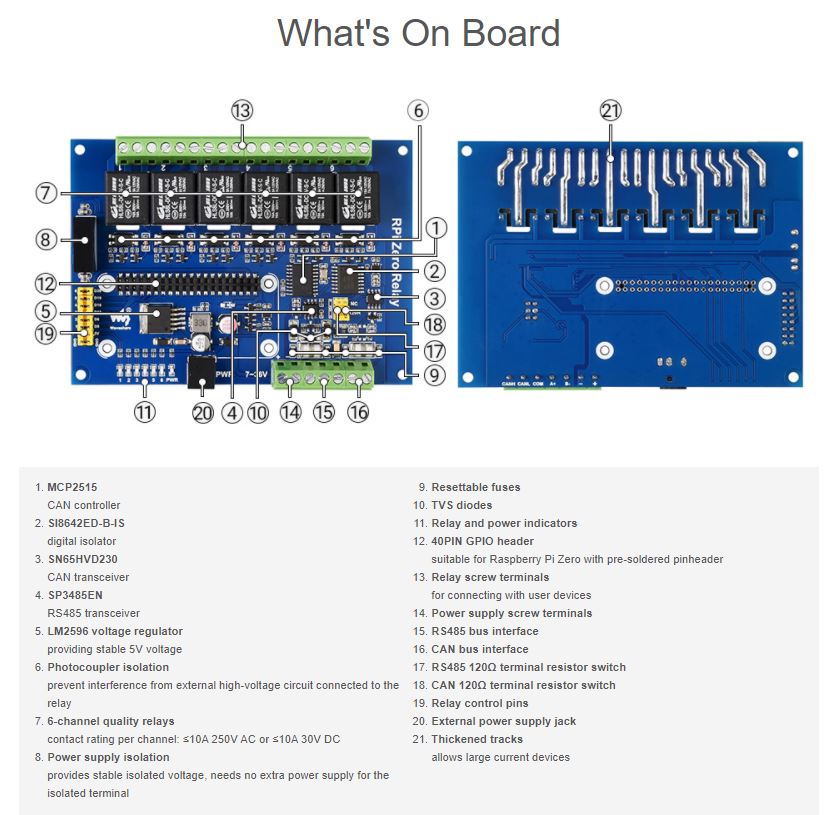
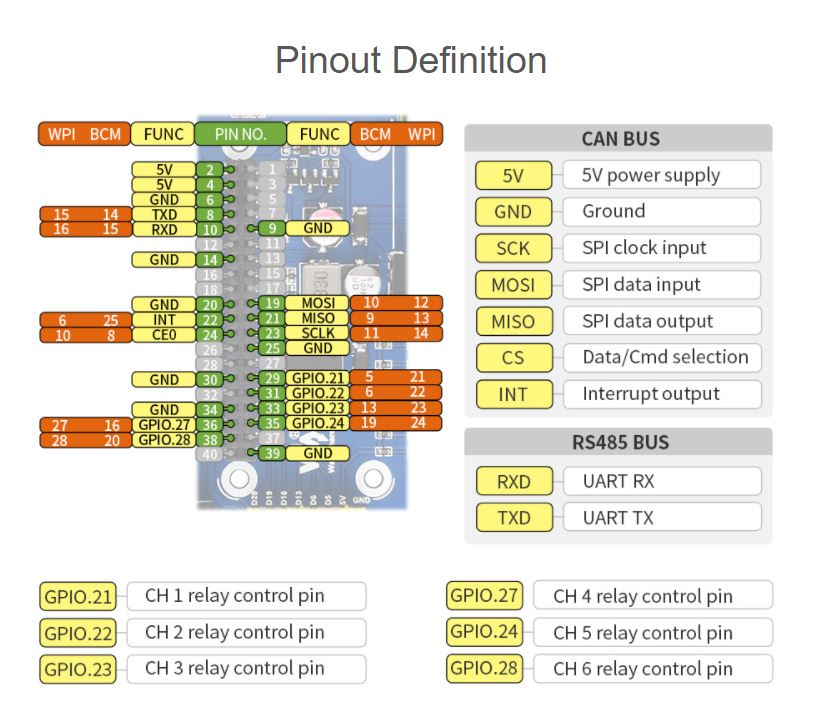
RS485 half-duplex communication: using SP3485, UART control, auto RX/TX switch
CAN half-duplex communication: using MCP2515 + SN65HVD230 solution, SPI control
Onboard unibody power supply isolation, provides stable isolated voltage, needs no extra power supply for the isolated terminal
Onboard photocoupler isolation, prevent interference from external high-voltage circuit connected to the relay
Onboard TVS (Transient Voltage Suppressor), effectively suppress surge voltage and transient spike voltage in the circuit, lightningproof & anti-electrostatic
Onboard resettable fuses and protection diodes, ensuring current/voltage stable output, preventing over current/voltage, better shock-resistance performance | High quality relay, contact rating: ≤10A 250V AC or ≤10A 30V DC |
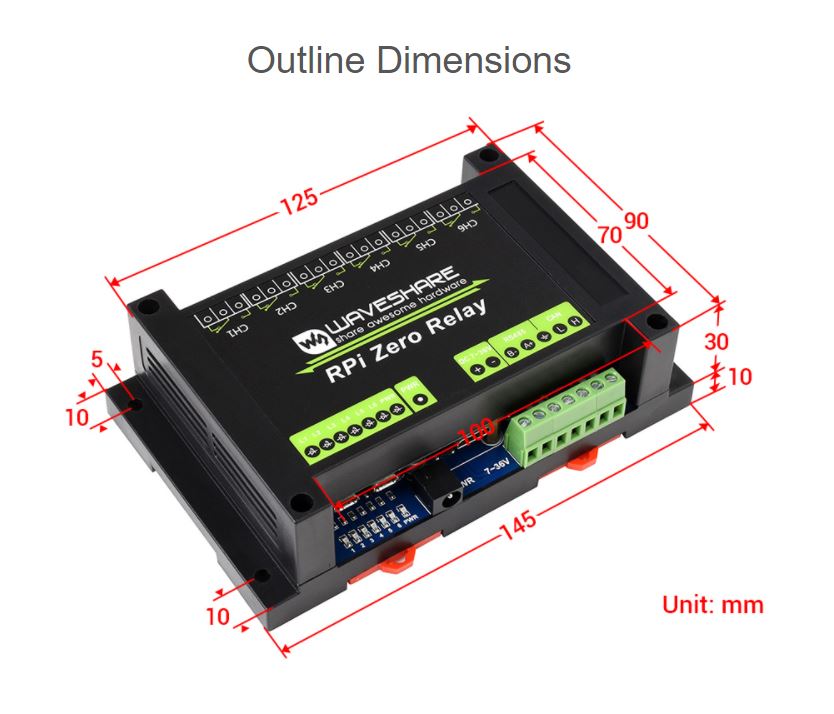
ABS protection enclosure with rail-mount support, easy to install, safe to use | Comes with development resources and manual (wiringPi and python examples) |
Specifications of Relay Pi Zero:
| OPERATING VOLTAGE | 7V~36V (industrial input voltage compatible) | RELAY CHANNEL | 6 ch |
|---|---|---|---|
| COMMUNICATION PROTOCOL | RS485, CAN | CONTACT FORM | 1NO 1NC |

What is CAN bus
A Controller Area Network is a robust vehicle bus standard designed to allow microcontrollers and devices to communicate with each other’s applications without a host computer. Wikipedia
CAN Bus Basics
| Wiring: | Node: |
|---|---|
| CAN Bus uses two-wires differential signals. One is called CAN-H (High) and the other CAN-L (Low). | CAN Bus needs at least two nodes to make the network “up”. So testing with one node will not work: this is the mistake n°1: Never use only one CAN Bus node. |
| Termination: | Controller: |
|---|---|
CAN Bus needs termination resistors between CAN-H and CAN-L at each end. Mainly to avoid signal reflections. ISO 11898 recommends the value R=120Ω. And that’s the mistake n°2: Without termination your CAN Bus will not work correctly. | CAN Bus is a multi-master protocol, each node needs a controller to manage its data. The Controller is connected to the CAN bus using CAN-H and CAN-L.Example of controllers: MCP2515, SJA100,… |
| Transceiver: | Regrouping all the above parts: |
|---|---|
| CAN controller needs a send/receive chip to adapt signals to CAN Bus levels. Controller and Transceiver are connected by two wires TxD and RxD. Examples: MCP2551, TJA1040… |  |
Resources :
WIKI: RPi_Zero_Relay


